第三届全国大学生嵌入式系统设计竞赛全国三等奖
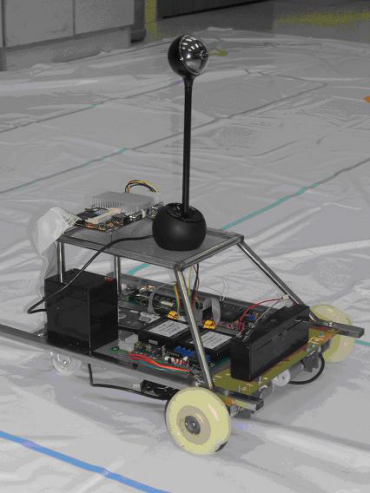
基于ECX平台的变电站值班机器人
设计:2007届本科生 高聪哲 王立斌 蒋勇
指导教师:郭珂
完成时间:2006年7月
针对目前电力系统无人值守变电站数字化、智能化管理的发展趋势。集中了无线局域网,GSM/GPRS,多传感器信息融合和多媒体等多项前沿技术,提出了一套基于Intel ECX平台的变电站值班机器人解决方案。通过GIS电子地图对移动机器人进行导航和定位,实现了音视频数据采集和编码、现场数据检测、实时传输和安全报警,并实现了机器人一定程度的自主巡视、值守等功能。整个系统界面友好、功能丰富、实用性强、扩展性好,具有广阔的应用前景。
1、实现了音视频采集、远程传输,将现场信息通过Internet进行远程传输,以便实现对现场进行远程实时监控。
2、 具有消防、安全防范报警功能,通过分布的报警探测器对现场非法入侵及火灾情况进行探测和报警。
3、具有设备温度检测功能,通过红外非接触测温模块实现对设备远距离测温,以便进行工作状况分析。
4、可在远程控制室对机器人进行远程直接控制,获得现场直接监测效果。
5、可通过对摄像头运动控制采集到不同方位,宽范围的现场视频数据,和温度数据。
6、系统支持自主行走方式,具有一定自主巡视功能。
7、具有移动物体捕捉功能,对现场可疑移动物体或设备空间位置变化进行 捕捉、存储、报警。
8、支持短信方式报警,使监控工作更灵活、人性化 。
9、具有现场信息采集存储功能,可将非常情况下的现场音视频信息存储下来,以便进行事后分析。
10、 在现场进行人工维修时可以作为与指挥中心的远程指挥及信息交互工 具。
11、通过远程桌面传输,可以在远程监控端实现对机器人端的系统管理及设置。

机器人主站控制软件 变电站值班机器人

